JÁRMŰKÖVETŐ RENDSZEREK
VULTRON integrált utastájékoztatási és járműkövetési rendszer
A VULTRON Trade Kft. fedélzeti utastájékoztatási rendszere az USA-ban, Európa több országában és ma már itthon is, összességében több ezer referenciával rendelkezik. A VULTRON Trade Kft. már a 90-es évek második felében kifejlesztette és utastájékoztató rendszerébe integrálta a Trimble ( későbbi modelljeiben esetenként Motorola) coremodulon alapuló saját GPS vevő készülékét. A mai európai normák az utastájékoztatással és járműkövetéssel kapcsolatban újabb igényeket fogalmaznak meg. Ugyanakkor az igényes rendszerfejlesztési követelmények megfogalmazhatóságát maga a technikai fejlődés is számos tekintetben támogatja. A napjaink elektronikus berendezéseit bemutató anyagokban folyamatosan visszatérő, tipikusan a mobil rendszerek informatikai fejlesztései által ismertté vált technikák és eszközök (GSM, GPS, GPRS, VoiceOverIP, MP3) megannyi alkalmazási területre törtek be és bizonyultak hatékony, rugalmas, megbízható és költségkímélő megoldásnak. A VULTRON integrált utastájékoztatási és járműkövetési rendszere egyaránt épül e korszerű eszközök alkalmazására és napjaink szoftver fejlesztési/integrálási technikáira.
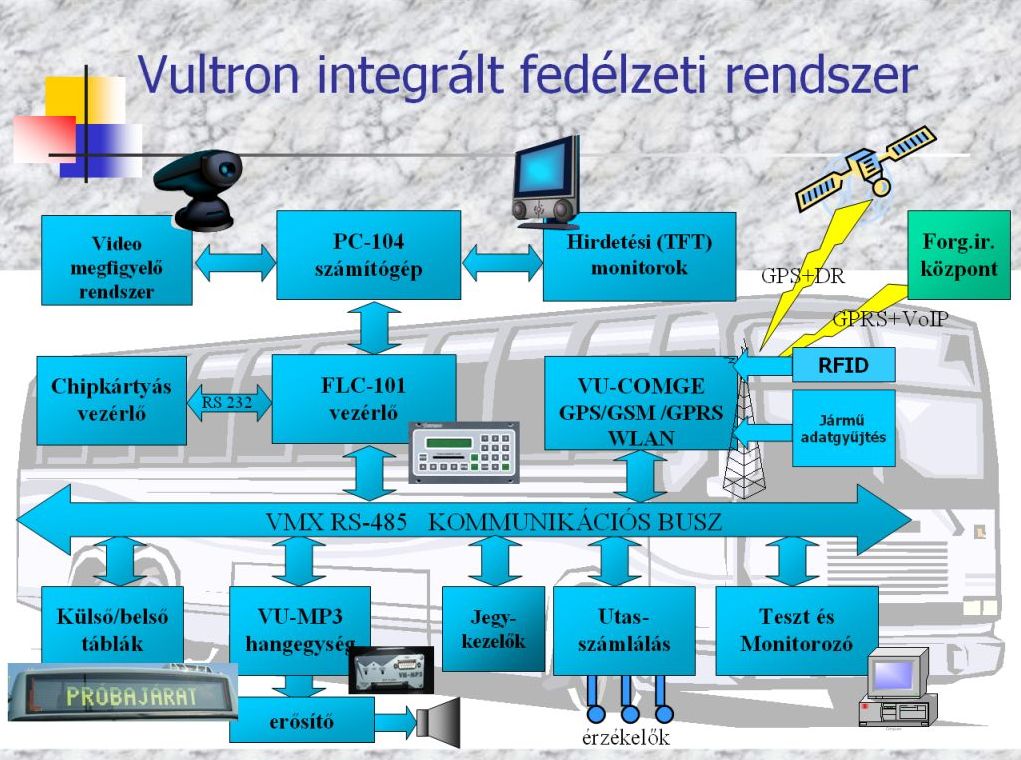
A rendszer felépítését a következő ábra szemlélteti:
1. ábra: A felügyeleti rendszer felépítése I.
A távfelügyeleti központ struktúrája:
2. ábra: A felügyeleti rendszer felépítése II.
A VULTRON utastájékoztató és járműkövető rendszere hierarchikus felépítésű, áttekintéséhez célszerű három szintet megkülönböztetni. A járműveken felszerelt berendezések jelentik a készülékek szintjét, amelyek körébe a külső és belső információs táblák, jegykezelő és jegykiadó automaták, a digitális hangbemondás eszközei, továbbá a GPS vevők tartoznak. A digitális elven működő készülékek kezelése hálózati szervezésű, a VULTRON rendszerek esetén az egyes készülékek vezérlését megvalósító hálózati kommunikáció a VULTRON VMX protokoll szerint történik. A VMX hálózaton történő tranzakciók kezdeményezője a VULTRON kontroller, amely a második szintet, a készülékvezérlő szintet valósítja meg. A vezérlő alapvetően a vezérlő memóriájába az alkalmazást megelőzően letöltött adatbázis (táblaképek, hangbemondásokat vezérlő adatok, járatinformációk) alapján, valamint kezelői billentyűzési szekvenciák feldolgozásával működteti az utastájékoztatási funkciókat ellátó készülékeket. A járművek egy csoportjának vagy akár a teljes járműparknak az irányítása megkívánja, hogy az egyes járművek kontrollerei egy kommunikációs hálózaton keresztül legyenek elérhetők. A mobil távközlési eszközök előretörésével ezt a hálózatot a költséghatékonyság érdekében célszerű a GPRS technikával megvalósítani, ahol a költségek az átvitt információ mennyiségével arányosak. Az időben állandóan meglévő GPRS kapcsolat adatfolyamának kezelésére a mobil szolgáltatók felkészültek, a GPRS adatkommunikáció feldolgozását végző távfelügyeleti járműkövető rendszer szintje számára egy internetes felületet biztosítanak. Ennek következtében a távfelügyeleti szint feladatai színvonalasan, rugalmasan, skálázhatóan és megbízhatóan valósíthatók meg. A bővíthetőség nem csupán mennyiségi vonatkozásban természetes rendszeradottság, hanem például alkalmas bármilyen chip-kártyás jégykezelő rendszerrel való aktív együttműködésre is, amennyiben GPS információkat oszthat meg, illetve menet közben képes a jegykezelési tranzakciók statisztikáit elkészíteni és felküldeni a távfelügyeleti központnak.
A fentiekben körvonalazott rendszerstruktúra számos, az utastájékoztatáshoz, járműkövetéshez és üzemeltetéshez tartozó szolgáltatás hátteréül szolgál. A minden szinten kézben tartott hálózati kommunikáció következtében például transzparens módon lehet a járműfedélzeti készülékek minden elemét közvetlenül az üzemirányítási központból vezérelni, adott táblaképeket megjeleníteni vagy hangbemondásokat indítani. A szolgáltatások alapvetően kétféle információáramlási minta szerint valósíthatók meg: a kontroller felől kezdeményezve vagy a távfelügyeleti szintről kezdeményezve, ez utóbbi esetben válasz információt vagy csak nyugtázást várva a leküldött parancsra.
A kontroller által periodikusan összeállított és felküldött üzenetek az alábbi információkat tartalmazhatják: GPS koordináták, a jegykezelők esetleges hibája hibakóddal és készülékre vonatkozóan azonosítva, tábladiagnosztika továbbítása, kezelői kérések és jelzések felküldése. A távfelügyeleti szintről kiadott parancsok a kontroller által transzparensen átengedve közvetlenül vezérelhetik a járműfedélzeti eszközöket, ezeket a parancsokat a kontrollernek csupán nyugtázni kell. Válasz üzenetet kiváltó parancsok a forgalomirányítás számára értékes (periodikusan fel nem küldött) információkat kérhetnek fel a diszpécseri szintre (pl. a jegykezelések, ajtónyitások, vakok és gyengén látók észlelésének száma egy meghatározott időszakban).
3. ábra: A járműveken felszerelt berendezések
Az automatikusan beérkezett vagy diszpécseri kezdeményezést követően rendelkezésre álló információk alapján a diszpécseri szinten többterminálos alkalmazások formájában, grafikus kezelői felületen keresztül számos szolgáltatás áll rendelkezésre, amelyek köre a felhasználói igények szerint tovább bővíthető. Térképes megjelenítés esetén a térképen kiválasztott járműre klikkelve a kiválasztott – és adatokkal a képernyőn azonosított - járművel kétirányú kommunikáció indítható a kívánt adatok, információk real-time leküldésére avagy lekérdezésére. A megjelenítésen túlmenően egyéb, az üzemirányítás által specifikált feldolgozások, a forgalmi helyzetek utólagos kiértékelését lehetővé tevő esemény tárolások tartoznak a szolgáltatási funkciókhoz.
A programozható időzítéssel felküldött (jelenleg 5 mp a VULTRON rendszerben és 30 mp az AVM-nél) jármű pozíciók nem csak digitális térképen jeleníthetők meg, hanem a jól bevált, járatonkénti kétszer egyvonalas (lásd AVM rendszer megjelenítése) képernyő is választható a járműforgalom monitorozására. Az egyvonalas képernyős megjelenítésnél ügyeltünk arra, hogy az a BKV operátorok által megszokott, jelenleg használatos AVM rendszerrel teljesen azonos formában és színekben jelenjen meg, így a kezelő számára egységes felületet biztosítunk.
A kezelői felület más felhasználóknál igény szerint módosítható.
A rendszer központi és egyben legfontosabb elemét a kiszolgáló szerverek rendszere alkotja. Ez a megfelelő rendelkezésre állás biztosítása, illetve a skálázhatóság érdekében egy egyenlő jogú szerverekből álló hálózat. Ebben az egyes szerverek meghatározott időközönként átadják egymásnak a felügyelt járművek információit, így minden szervernek rendelkezésére áll minden felügyeleti információ. Mind a kliensek, mind a járművek bármelyik szerverhez kapcsolódhatnak, természetesen az előírható korlátozások figyelembe vételével. A struktúrából adódóan egy szerver kiesése esetén az adott szerverhez kapcsolódó klienseknek és kontrollereknek egy másik szerverhez tudnak kapcsolódni, és folytatni a munkát.
Az egyes szerverek terhelését célszerű egyenletesen elosztani. Ennek megvalósítása elsősorban a kontrollerek esetén jelent külön feladatot, mivel ezeknek az egységeknek automatikusan kell eldönteniük melyik szerverhez kapcsolódjanak. Ehhez szükség van egy elosztó szerver alkalmazás létrehozására, amely fogadja a szerverek teljesítmény adatait és ez alapján megadja a kontrollernek a kapcsolódási címet. Ez megvalósítható egy speciális DNS szerver létrehozásával is, de célszerűbb egy célszolgáltatás használata. Természetesen az elosztó szerver(ek) kiesésének az esetére is szükséges egy fallback algoritmus. Ez lehet egy másodlagos terhelés elosztó szerver, vagy egy a kontrollerekbe épített egyszerű preferencia lista.
A szerver a járművek konfigurációs adatait, menetrendeket az adatbázis rendszerből olvassa be, illetve a logokat, mentéseket, stb. szintén ott tárolja. Amennyiben a felügyelt járműpark mérete ezt szükségessé teszi, felmerülhet adatbázis cluster technológia használata is.
Az adatbázis által eltárolt adatokból később kimutatásokat, statisztikákat készíthetünk. Ezeket az alkalmazásokat a megrendelő igényeihez lehet fejleszteni, hogy a lehető legjobban illeszkedjen a meglévő adminisztrációs struktúrába.
A szerver alkalmazások implementlására alapvetően Linux alatt C++ környezetet választottunk. Természetesen ettől eltérő igények esetén lehetőség van más platform használatára is.
A szerverek egymás közötti kommunikációja TCP/IP csatornákat használ, szükség szerint SSL titkosítással. A flexibilitás érdekében a csomagok az ASN.1 BER kódolást használják. (Ezt a megoldást a kisebb sávszélesség igény miatt preferáljuk az XML használatával szemben.)
A kliensekkel a kommunikáció hasonlóan valósul meg. Szintén TCP/IP csatornákat, és ASN.1 BER kódolású protokoll csomagokat használunk. Megbízhatatlan belső hálózat esetén ezt szintén ki lehet egészíteni SSL kódolással.
A kontrollerekkel jelenleg TCP/IP csatornán egyéni kódolású csomagokkal kommunikál a szerver alkalmazás. A jelenlegi kontrollerekkel a megvalósítható biztonsági szint az authentikáció használata. De nagyobb teljesítményű kontrollerekkel a kommunikáció titkosítására is lehetőség nyílik, amennyiben ez igény.
Fizikailag a szerverek és a kliensek között lokális hálózaton történik az adatátvitel. A kontrollerek esetén pedig mobil szolgáltató közbeiktatásával GPRS-en.
A klienseknél külön választjuk az operátorok, az adminisztrátor klienseit, valamint az egyéb adminisztratív klienseket. Az adminisztrátor kliens (más néven Fődiszpécser) feladata az operátorok adminisztrációja. Az operátor kliens (diszpécser) felülete tartalmazza a járművek pozíciójának reprezentációját, továbbá elérést nyújt a járművek felé. Az egyéb adminisztratív funkciók közé a viszonylatok felvétele, a menetrendek szerkesztése, statisztikák, kimutatások készítése, és az archiválás tartozik.
Az operátor klienseknek több változata is létezik, amelyek a jármű pozíciók reprezentálásában térnek el egymástól, alkalmazkodva a felhasználói igényekhez.
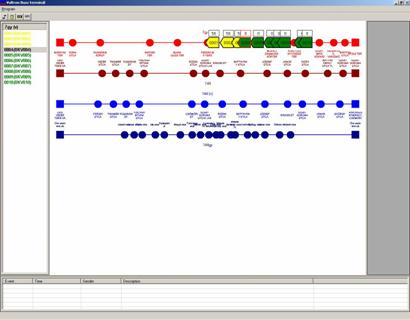
4. ábra: Vonalas kliens
STACIONER RENDSZEREK
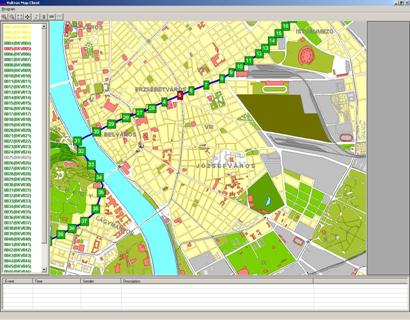
5. ábra: Térképes kliens
Az operátorok felülete igényli a jármű pozíciók megjelenítését. A több felmerülő lehetőség közül a vektorgrafikus térkép használata mellett szól a legtöbb érv. Azonban jellegéből adódóan ez egy olyan léptékű komponens, amelyet külön álló ActiveX objektumként illesztettünk a kliensbe.